2770
Proceedings of the 18
th
International Conference on Soil Mechanics and Geotechnical Engineering, Paris 2013
moment function,
, is a first order polynomial, Eq. (13) is
solved by second integral with a single Gaussian point as
=
=
′
(13)
where
=
or
in Eq. (13),
′
is the weight for the single
Gaussian point (i.e.,
′
= 2.0, referring to Table 1), and
is the
sensor position projected from the Gaussian point in the range
between 0 to
. Note that
is in the middle of the target length
according to Table 1. Figure 6 shows the exact locations of
in
the testing configuration.
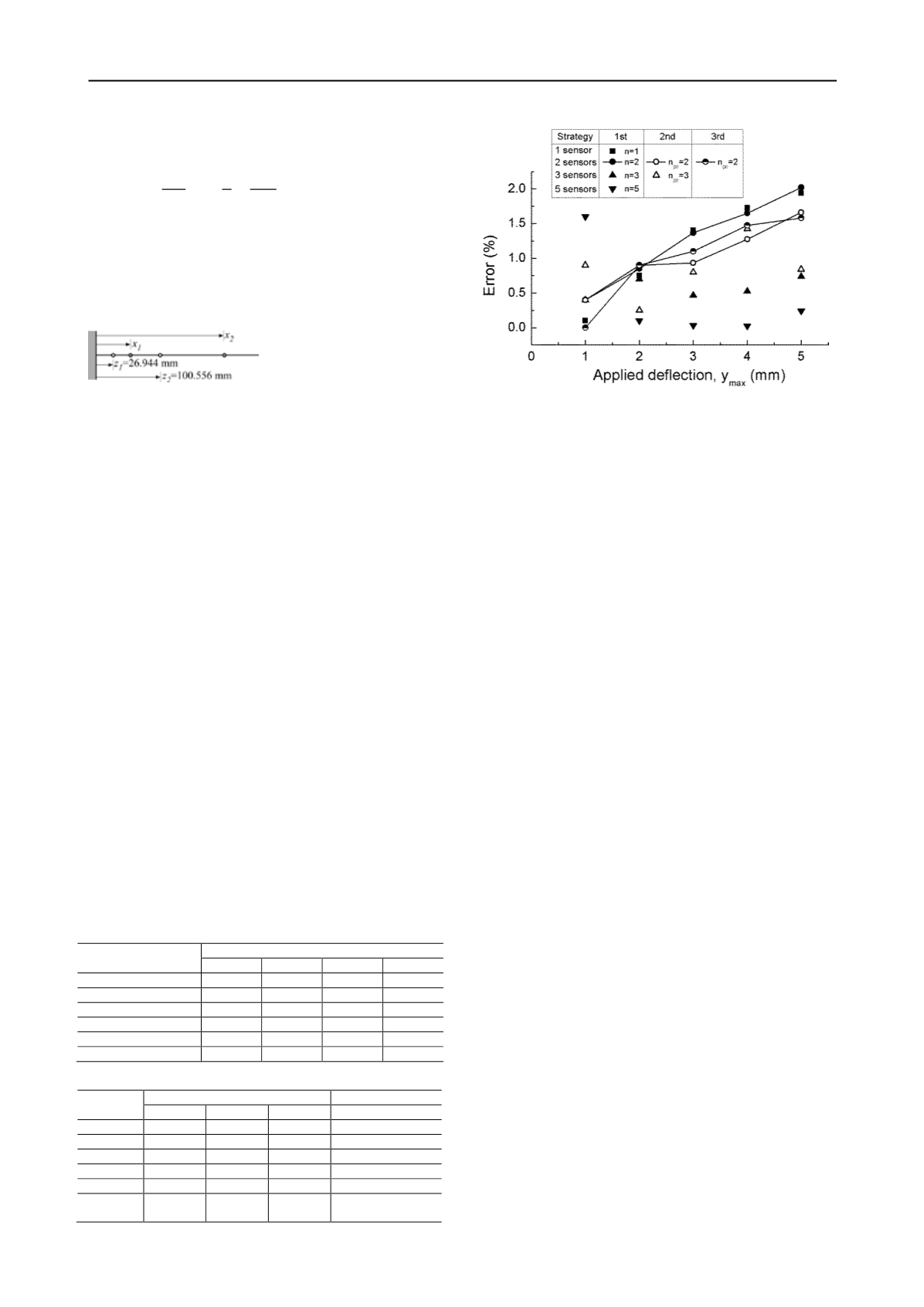
Figure 6. Optimal location of the sensors for cantilever beam
According to the different configurations for three different
strategies illustrated in Figures 5 and 6, the FBG sensors were
inscribed on the optic fiber attached to the bar specimen, and
then the displacement was applied repeatedly by more than ten
times. Table 4 compares applied and calculated values of
for the configurations with sensors positioned at the regular
intervals. As the number of sensor increases, the error
significantly decreases. Figure 7 shows the variation of errors
against increasing applied deflection. When employing one or
two sensors, the error increases as the applied deflection
increases. When three or five sensors are used, the errors remain
approximately constant irrespective of applied displacement.
Table 5 compares the applied and calculated values of
for the configurations with sensors positioned at the projected
Gaussian points. Even in this case, the errors are also decreasing
as the number of the sensors increases. For the same number of
sensors, however, the error in the configuration according to the
second strategy is smaller than that for the first strategy. This
implies that positioning sensors deployed via the analytical
formula exhibits better performance than uniformly distributed
sensors.
As shown in Table 5, the error of sensors deployed with the
third strategy yields much better performance than others. The
average error for the third strategy is smaller by 0.2% than the
error for the first strategy, and even smaller than the error for
the second strategy by 0.03%. It is obvious that measuring
displacement rigorously based on the Gaussian quadrature rule
is superior to other cases because of its simple calculation,
whereas the results indicates that increasing the number of
sensors uniformly would give better measurement than
employing the Gaussian quadrature rule.
Table 4. y
max
, using sensors positioned at the regular intervals
Applied
y
max
, mm
y
max
using 1
st
strategy
n=1
n=2
n=3
n=5
1
0.999
0.996
0.996
1.016
2
1.985
1.983
1.986
2.002
3
2.958
2.959
2.986
2.999
4
3.931
3.934
3.979
3.999
5
4.903
4.899
4.963
4.988
Average error, % 1.18
1.25
0.54
0.28
Table 5. y
max
, using sensors positioned at projected Gaussian points
Applied
y
max
, mm
y
max
using 2
nd
strategy
Using 3rd strategy
n
gp
=1
n
gp
=2
n
gp
=3
n
gp
=2
1
0.999
0.996
0.991
1.000
2
1.985
1.982
1.995
1.982
3
2.958
2.972
2.976
2.967
4
3.931
6.949
3.943
3.941
5
4.903
4.917
4.958
4.921
Average
error, %
1.18
1.04
0.84
1.01
Figure 7. Errors in measurement using three different strategies
3 CONCLUSION
Using multiplexed FBG sensors require a careful deployment
scheme to minimize errors in measuring lateral displacement of
the pile through the least number of sensors. Herein, a new
approach to deploy the FBG sensors for measurement of lateral
displacement of piles was introduced. The Gaussian quadrature
formula was adopted to minimize the error in measuring the
deflection of a laterally loaded pile. The performance of
Gaussian quadrature formula for optimizing sensor positions
has been tested using the aluminum bar specimen representing a
lab-scale cantilever beam with the clamped end. Primary
objective for sensor deployment was set to minimize the error in
measuring the maximum deflection at the point of loading.
Three optimization strategies—positioning sensors at regular
intervals, positioning sensors at projected Gaussian points but
not following the Gaussian rule, and positioning sensors exactly
based on the Gaussian rule—were implemented. In both cases
for the first and second strategies, the measurement error
decreases as the number of sensors increases. For the same
number of sensors, however, the second strategy where the
sensors were positioned at the projected Gaussian points
reduces the errors by 0.2% than those for the first strategy.
Positioning the sensors rigorously based on the Gaussian
quadrature rule enhances the accuracy more than just using the
Gaussian points. The experimental results suggested that the
analytical deployment plan using the Gaussian quadrature rule
can be helpful in crafting a placement in measuring the
displacement of the laterally loaded pile accurately.
4 ACKNOWLEDGEMENTS
This work was supported by the National Research Foundation
of Korea (NRF) grant funded by the Korean government
(MEST) (No. 2009-0090774)
5 REFERENCE
Abramowitz, M. and Stegun, I.A. (1972), Handbook of Mathematical
Functions, Dover, ISBN 978-0-486-61272-0
Chung, W., Kang, D.H., Choi, E.S., Kim, H.M. (2005), “Monitoring of
a steel plate girder railroad bridge with fiber bragg grating sensors,”
Journal of Korean Society of Steel Construction, Vol. 17, No. 6, pp.
681-688.
Habel, W.R. and Krebber, K. (2011), “Fiber-optic sensor applications in
civil and geotechnical engineering,” Photonic sensors, Vol. 1, No. 3,
pp. 268-280.
Lee, W., Lee, W.-J., Lee, S.-B., and Salgado (2004), “Measurement of
pile load transfer using the Fiber Bragg Grating sensor system,”
Canadian Geotechnical Journal, Vol. 41, No. 6, pp. 1222-1232.


